To my Patrons who generously edit my book: this Chapter is not quite ready for editing. I have left
in a number of paragraphs that I will eventually modify or remove.
In a Euclidean space, the shortest path between two points is a straight line. The concept of a
geodesic is a generalization of this idea to curved surfaces and, more broadly, to Riemannian
spaces.
Given two points on a surface, a geodesic is an embedded curve of shortest length connecting the
two points. Before we go any further, we must note that the Euclidean experience teaches us that
the concept of a geodesic is closely connect to the question of curvature or, more precisely, that
of zero curvature. For a curve in a Euclidean space, straightness corresponds to the condition of
vanishing absolute curvature, i.e.
For a geodesic on a surface, the
analogous criterion is the condition of vanishing geodesic curvature, i.e.
Establishing this equation and
exploring its implications are the central goals of this Chapter.
The condition of zero geodesic curvature is necessary but not sufficient for a curve to be the
shortest path between two points. However, we will eventually broaden the definition of a geodesic
to include any embedded curve of zero geodesic curvature even if it does not represent the shortest
path between two given points.
10.1Geometric insights
Before we turn to our analytical investigations let us begin my making a few insightful geometric
observations.
For a developable surface, constructing a geodesic is a straightforward task. Since a developable
surface can be transformed into a region of a plane without distortion, every geodesic maps to a
straight line in corresponding planar region -- provided that the surface does not require a cut
that passes right through the geodesic in order to be transformed into a section of a plane. 
 (10.3)
(10.3)
(10.3)This observation suggests a practical approach for constructing the geodesic between two points on
a developable surface and that is to 1. isometrically transform the surface onto a region of a
plane, 2. connect the images of the two points by a straight line, provided that line is wholly
contained within the region of the plane, and 3. isometrically transform the region of a plane back
into the original surface. 
 (10.4)
(10.4) 
 (10.5)
(10.5)
(10.4) (10.5)Of course, this method would yield an incorrect curve if the developable surface required a cut
that passed through the actual geodesic. This possibility is illustrated on the surface of a
cylinder in the following figure.  (10.6)
(10.6)
(10.6)Let us now turn our attention to the sphere. On the surface of a sphere, the shortest path
connecting two points is a segment of a great circle. 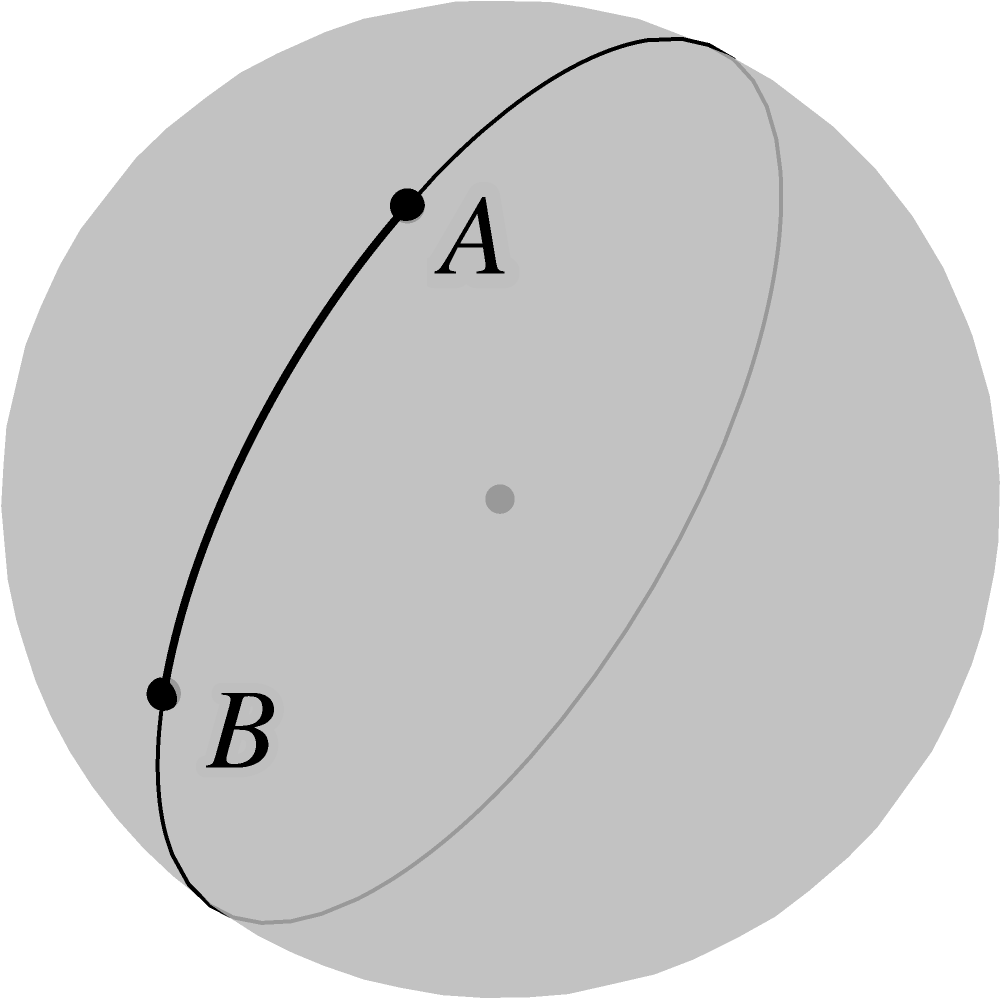 (10.7) Two distinct points on the surface of a sphere uniquely
determine a great circle. Naturally, the shorter of the two circular segments represents the
shortest distance between two points. Recall from Chapter 9 that the geodesic curvature of a great circle is zero. This is our first,
albeit narrow, confirmation that geodesics are characterized by zero curvature.
(10.7) Two distinct points on the surface of a sphere uniquely
determine a great circle. Naturally, the shorter of the two circular segments represents the
shortest distance between two points. Recall from Chapter 9 that the geodesic curvature of a great circle is zero. This is our first,
albeit narrow, confirmation that geodesics are characterized by zero curvature.
(10.7)The sphere also clearly shows us that geodesics are not unique: all "meridians" simultaneously
represent the shortest distance between two diametrically opposed points. 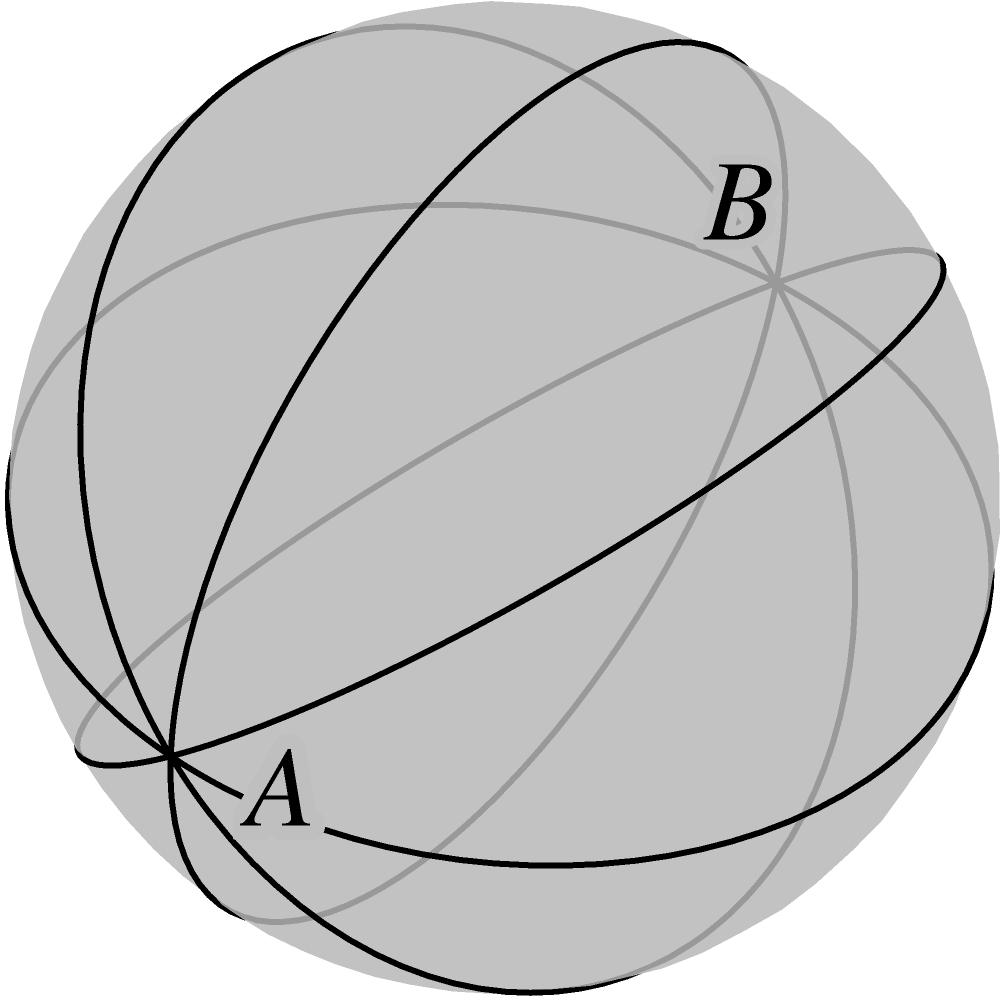 (10.8)
(10.8)
(10.8)10.2In search of the geodesic equation
Consider the practical task of finding the geodesic connecting two points and on a surface specified by analytical
means. This task can be accomplished by formulating and solving a set of ordinary differential
equations, known collectively as the geodesic equation, for the functions representing the equations of the curve
If our intuition regarding the
relevance of curvature is correct (and it is!), then we should expect a system of
second-order differential equations.
As our discussion will feature numerous instances of the derivatives of , let us borrow the "dot" notation from the
Calculus of Variations and use the symbols
and
to denote those derivatives, i.e.
You will also find it very helpful to think of
as the speed with which an image particle moves along the curve and and
as its acceleration.
We will derive the geodesic equation in two ways. In the first approach, we will expand the zero
geodesic curvature condition
in terms of the underlying functions
. In the second approach, we will apply the
techniques of the Calculus of Variations to the length functional
Regardless of the approach, however, we must recognize that such a system cannot be of the usual
"Newton's second law" form
i.e. one where the leading-order
derivatives are expressed as explicit functions of the lower-order ones. The fundamental reason for
that is this: while the solutions of such systems are -- generally speaking -- unique, the
functions cannot be unique.
The unavoidable lack of uniqueness is, of course, due to the possibility of reparameterization.
After all, we have not restricted the parameterization of the geodesic in any way. As a result,
there are infinitely many functions that represent the geodesic connecting the points and . For example, suppose the geodesic is
represented by the equations
where, say, corresponds to and corresponds to . Then it is likewise represented by the equations
or, more generally, by the equations
where is any strictly monotonically increasing
function from to . To use a physical analogy, such a reparameterization
changes the speed of a particle moving along a trajectory but not the trajectory itself.
This a priori lack of uniqueness dictates that we must expect two features from the eventual
system of differential equations. First, the system will be of the form
where the leading derivatives are
engaged in a set of implicit functions that cannot be solved uniquely for the leading derivatives
. And, second, in order to achieve uniqueness,
the system must require to be supplemented by a specification of the precise manner in which the
parameterization evolves along the curve. For example, we may wish, as is often done, to specify
that the geodesic is parameterized by arc length. Then the supplementary condition would be
10.3Intuitive considerations
In this Section, we will describe several intuitive geometric reasons why geodesics are
characterized by zero geodesic curvature, i.e.
Recall that the geodesic curvature is a measure of how much the curve bends within the
surface. The quintessential example of this perspective is the difference between of a "straight"
road and a curved one. 
 (10.19) Surely, the
shortest path between two points on the surface of the Earth is represented by a "straight" road,
i.e. a curve characterized by zero geodesic curvature. Of course, a "straight" road is not actually
straight but follows a great circle which, as we reminded ourselves earlier, is characterized by
zero geodesic curvature.
(10.19) Surely, the
shortest path between two points on the surface of the Earth is represented by a "straight" road,
i.e. a curve characterized by zero geodesic curvature. Of course, a "straight" road is not actually
straight but follows a great circle which, as we reminded ourselves earlier, is characterized by
zero geodesic curvature.
(10.19)We may also notice that a great circle has the property that its principal curvature is aligned with the surface normal . A little bit of mental experimentation should convince us
that this is a general characteristic of a geodesic. As a visual aid, take a non-spherical curved
surface, such as an egg, and draw the shortest path connecting two points.  (10.20) If you visualize the curvature normal of the resulting curve and the surface normal you will observe that the two vectors are aligned. According
to the equation of the three curvatures
(10.20) If you visualize the curvature normal of the resulting curve and the surface normal you will observe that the two vectors are aligned. According
to the equation of the three curvatures
(10.20) this relationship between and implies that the component of the geodesic normal vanishes, i.e.
This argument can be augmented by a physical thought experiment. A free particle moving in a
Euclidean space without the influence of any forces moves in a straight line which represents the
shortest path between any two points that it visits. Suppose now that the particle is constrained
to move within surface but without any additional influences, such as friction. Then two
things are intuitively clear about the motion of this particle. First, it travels along the
shortest path connecting any two points that it visits. Second, the force that constrains it to the
motion within the surface acts in the normal direction . As a result, its acceleration also points along . This implies that the particle moves with constant velocity
and therefore, as we first established in Chapter TBD of Introduction to Tensor Calculus,
its acceleration, being ,
also points along the principal normal . Thus, and are collinear and therefore and we have another confirmation
of the fact that the geodesic curvature vanishes.
Note that this argument also establishes that the constraining force acting on the particle is given by
which gives additional meaning to
the normal acceleration
and therefore also to the curvature tensor .
10.4The expanded definition of a geodesic
Let us broaden the definition of a geodesic to include any surface curve characterized by zero
geodesic curvature, i.e.
By definition, for a geodesic, the equation of three curvatures
reduces to
Thus, the absolute curvature of a geodesic equals the absolute
value of the normal curvature ,
i.e.
In this sense, among all possible
embedded curves tangential to a given direction ,
a geodesic is the curve that is least curved or, to put it another way, is the one that is as
straight as possible.
10.5The geodesic equation from the zero geodesic curvature condition
Suppose that a geodesic is described by the equations of the curve
The goal of this Section is to
construct a set of ordinary differential equations that determine . As we discussed earlier in Section 10.2, we expect the resulting system to be of the implicit
form
that cannot be uniquely solved for
the leading derivatives . Furthermore, we should expect to find a
system that requires to be augmented by the rule for parameterizing the curve.
The task at hand can be accomplished by interpreting the analytical definition
of a geodesic in terms the
underlying functions . For the time being, let us switch from the
symbol to .
Recall that the geodesic curvature tensor is
given by
and therefore
However, for our purposes, we need
the more general identity
From this identity we see that the
condition of zero geodesic curvature translates into equations
Suppose that the equations of the curve are
Recall that the shift tensor
represents the derivative of with respect to the curve coordinate , i.e.
By directly appealing to the
definition of the covariant derivative, we have
Thus, is
given by
Equating it to zero yields
It is left as an exercise to show
that the term is
given by
Let us now switch back to the parameter and note that the term
corresponds to
while the shift tensor
corresponds to .
With this in mined, note that the factor of can
be cancelled, and we are left with
Combining the leading terms, we have
which can be written in the form
With the help of the symbol
it can be rewritten more compactly
as
We will return to the analysis of
this equation after we derive it again with the help of the Calculus of Variations.
10.6The geodesic equation by the Calculus of Variations
Perhaps the most straightforward analytical approach to deriving the geodesic equation is the
Calculus of Variations. The classical problem of the Calculus of Variations is to minimize or
maximize the functional
with respect to all possible smooth
functions for . The solution of the problem is represented by the
celebrated Euler-Lagrange equation which reads
In the case of multidimensional
functions , the Euler-Lagrange equation becomes a system
which reads
Thus, the problem of describing a geodesic, is precisely an example of the classical problem of the
Calculus of Variations where the functions play the role of the independent variations.
The length of the segment of the embedded curve corresponding to the
values of between and is given by the integral
where the metric tensor is
treated as a function of .
For this functional, the Euler-Lagrange equation reads
Let us now treat each of these terms
one by one.
10.6.1The term
By the chain rule
Recall that
Substituting this identity into the previous equation, we find
Notice, that owing to the symmetry
of the combination ,
we have
Therefore,
10.6.2The term
The analysis of this term is certainly more involved. For the partial derivative, we have by the
chain rule
By the product rule,
Substituting this into the preceding
equation, we get
Owing to the symmetry of the metric
tensor, the two terms in the numerator are equal and therefore
Next comes the application of the time derivative . By the product rule,
The first two terms are rather
straightforward. Since
we have
For the second term, since ,
we have
Turning our attention to the most
labor-intensive third term, we have by the chain rule
Then, we have by the product rule,
We have already discussed how to
deal with each of the terms and so we jump to the form
Owing to the available symmetries,
we have
Thus,
Finally, combining the three terms,
we find
10.6.3The combined equation
Putting the two terms together, the combined Euler-Lagrange equation reads
Observe that the terms
and
are equivalent and therefore cancel, and therefore we are left with
Next, multiply the equation by the
nonzero quantity ,
which yields
Next, raise the index , which yields
Then, recall the notation
We have
Finally, after rearranging the terms
and renaming several indices, we arrive at the exact same equation
we obtained by our earlier analysis
based on the zero geodesic curvature condition. Note, however, that had this been our only
approach, we would have had no way of knowing the geometric interpretation of this equation.
10.7Analysis of the geodesic equation
The equation
is precisely of the implicit form
that we hypothesized in Section 10.2. We further hypothesized that these equations cannot be
solved uniquely for the acceleration .
This is indeed the case for this system and to understand why this is so, let us consider the
second-order system
Let us ignore the placement of
indices for a moment. Note that if
corresponds to a vector , then the object above corresponds to
the symmetric matrix
This matrix is necessarily
nonsingular. Indeed, its null space is represented by the vector since
It is left as an exercise to show
that the null space of is strictly one-dimensional.
For a specific illustration, let
Then
and you can easily check that the
null space in fact corresponds to .
Taking the placement of indices into account does not change anything since it merely changes
into
where is the symmetric matrix corresponding
to .
Then
To repeat this logic in the tensor
notation, observe the following chain of identities:
Recall from Linear Algebra that the general solution of a linear system
where is a singular matrix with the null space spanned by a
vector , is given by
where is
any solution to the system, known as a particular solution, and is an arbitrary number. Rewrite the
geodesic equation
in the shape of a linear system,
i.e.
Then the solution
of this linear system at a given moment of "time" would have the form
where, once again, is
any solution and is an arbitrary number which we have no way of
determining from the system alone.
Note, however, that the undetermined part
of the acceleration
is proportional to the velocity .
In other words, the particular value of determines the speed with which the imagined
particle moves along the trajectory and not the trajectory itself. In other words, what is missing
from the geodesic equation is the choice of parameterization and supplying one makes the system
complete.
For example, let us specify that the geodesic is parameterized by arc length, i.e.
It is left as an exercise to show
that differentiating this identity with with respect to (i.e. arc length) yields
Thus,
or
Solving for , we find
Thus,
10.7.1Example: A Euclidean plane referred to affine coordinates
In the Euclidean plane referred to affine coordinates, the surface Christoffel symbols vanish and
therefore the geodesic equations
become
This is undoubtedly the simplest
form of the geodesic equation that still exhibits the feature associated with the arbitrariness of
parameterization. Solving for ,
we find
In other words
Let us stipulate that
Thus
So
Thus
and
10.8Arc length parameterization
A tremendous simplification occurs for arc-length parameterization:
or
This is the most familiar form of
the geodesic equation
10.9The Calculus of Moving Surfaces
Let us recount, in broad terms, how the Euler-Lagrange equation is derived for the functional
The starting point for the
derivation is to consider a family of functions enumerated by a smooth parameter in which the sought-after optimal function occurs at
. Then the quantity also becomes a function of , i.e.
whose minimum occurs at . Thus, the analysis proceeds by equating to the derivative of the integral with respect to .
To apply this tactic to the geodesic problem, consider a family of curves given by the equations
A specific family of such curves may
appear as in the following figure.
Correspondingly, the curve length
becomes a function of , i.e.
where
still denotes the derivative with respect to .
Instead of describing this collection of curves as a family, we may think of it as a single
moving curve that passes through the optimal confutations, i.e. the geodesic, at .
This is where the Calculus of Moving Surfaces comes in. The Caclulus of Moving Surfaces is an
extension of Tensor Calculus on surfaces to families of surfaces parameterized by a time-like
variable , i.e. moving surfaces. The Calculus of Moving
Surfaces has the following formula for a time-dependent line integral
Note that
thus
Noting that , we find
Since can be arbitrary, we arrive at the equation
10.10Exercises
Exercise 10.1Derive the identity
As a starting point, use the identity
that relates the surface and the ambient Christoffel symbols and then translate it to curves embedded in surfaces, i.e.